AndyMark will be closed on Fridays through August 1st to allow staff flexible summer work hours.
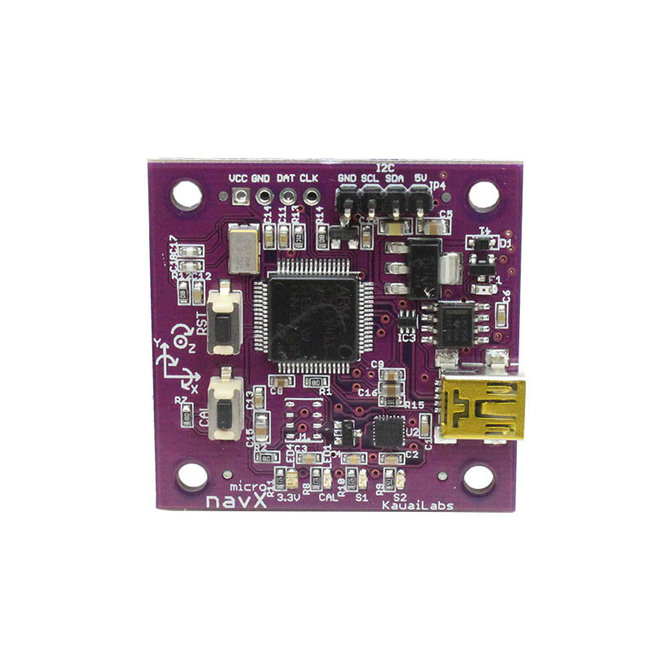

navX2-Micro Navigation Sensor Bundle
am-4076a
$116.00
This item is restricted for shipment in some countries. Please check international shipping restrictions before ordering.The navX-2 Micro is the greatest sensor for orientation in competitive robot...Read More
Product Overview
This item is restricted for shipment in some countries. Please check international shipping restrictions before ordering.
In addition to being an Inertial Measurement Unit, navX-Micro capabilities are referred to within the aerospace industry as an “Attitude/Heading Reference System” (AHRS). Kauailabs brings this high-tech AHRS capability to FIRST teams – to use, learn, and explore. navX-Micro is a key component of Kauailabs’ ongoing efforts to make state-of-the-art navigation technologies used in drones and autonomous vehicles (e.g., the Google Car) available to robotics students and enthusiasts as low-cost, open-source products.
Improvements over navX "Classic":
navX2-Micro features a new set of IMU & Magnetometer sensors with superior sensor specifications to those on the MPU-9250 sensor. This board has a faster 180Mhz microcontroller and an optimized startup time at 5 seconds versus 15 seconds. In addition, it has a completely new Kalman Filter-based Sensor Fusion algorithm running internally at a blazing fast 416Hz.
Individual Components in Bundle:
- 1 - navX-2 Micro Navigation Sensor (am-3554a)
- 1 - USB A to Micro B 2.0 Cable 6 Ft Long (am-4016)
- 1 - navX-2 Micro Navigation Sensor Case (am-4025)
- 1 - 4-Pin JST PH to Molex Cable (am-4363)
- 3-axis Magnetometer,LIS2MDL
- 32-bit ARM processor, ST Micro LSM6DSM IMU
- KalmanFilter-based data fusion
- High Accuracy, Low-latency Yaw, Pitch and Roll Angles calculated by real-time Kalman Filter running at 416Mhz
- Factory Accelerometer Calibration, Automatic Gyroscope Calibration
- Quaternions and Gravity-corrected Linear Acceleration and Velocity Measurements
- High-sensitivity Motion Detection
- Tilt-compensated Compass Heading
- 9-Axis absolute heading w/Magnetic disturbance detection
Inertial/Magnetic Measurement Unit:
- Configurable Update Rate from 4 to 200Hz
- Access to Raw Data from Gyroscopes, Accelerometers, and Magnetometers
Easy to Use:
- Plug-n-Play connection on FTC and FRC robots via I2C and USB interfaces
- 5V and 3.3V-compatible I2C Signaling
- Can be powered by either 5V or 3.3VDC
- Connection to Windows PC via USB Cable
- FTC and FRC Software libraries and sample code
- Support for Mounting in horizontal, vertical and even upside-down configurations via Omnimount
- Tools for Magnetometer Calibration
Specifications
- ADC Resolution: 16 Bits
- Accelerometer Sensitivity: +/- 16g
- Current: 50 Milliamps
- Gyro Sensitivity: +/- 2000 Degrees per Second
- Interface: I2C, USB Mini-B
- Magnetometer Angular Accuracy: +/- 2 Degrees
- Magnetometer Sensitivity: 1.3 Gauss
- Magnetometer Update Rate: 4 Hz
- Pitch/Roll Angular Accuracy: +/- 1.5 Degrees
- Product Lifecycle: Other options available, <a href='/products/navx2-micro-navigation-sensor?sku=am-4076a'>see this product and other options here.</a>
- USB/I2C Update Rate: 4-200 Hz
- Voltage: 5V DC
- Yaw Angle Accuracy: ~2 Degrees per Hour when Still, ~1 Degree when Moving
Documents
Guide(s)
Don't see what you need?
Returns
Returns are accepted within 30 days of purchase.
View our return policy here.
Recommendations


2 reviews
-
Box doesn't include the screws
Please add screws to this bundle to hold the box together.
-
It’s small. It’s s good.
Let’s say you have your RoboRIO mounted on your robot such that it isn’t level or oriented correctly for the compass. Of course you can dedicate some of the RoboRIO’s processing muscle to correcting orientation issues, but isn’t there a simpler way? This module solves the problem by allowing the NavX2 sensors to be mounted independently from the RoboRIO. The plastic case both aids in mounting and protects the sensor. As you might expect, there are some limitations, such as cable length, but overall, it’s a well thought out solution.




